
キッカケと問題
ある時子供が幼児用カップを両手で持つ様を見て、取手が付いているとはいえ「なぜカップはこんなに使いづらい形をしているのだろうか?」という疑問が浮かびました。本当に持ちやすいカップとはどのようなものなのか?
問題が大きいため条件を追加しました。それは「指1本でも持つことができるカップとはどのようなものか」というものです。子供は大人ほどまだ指をうまく操ることも握力も不足しています。そんな子供でも持つことができるカップならば、お年寄りや手指に障がいのある人でも持ちやすいカップとなります。そして同時にそれはどんな人にとっても持ちやすいユニバーサルなカップでもあります。
トポロジーと量産性
もし指が1本しかなく、中身の飲料物をこぼすことなくカップを持つには重心にアクセスするしかありません。通常のマグカップなどは取手の位置が重心から大きく外れており、別の指でカップが傾かないよう支える必要があります。また取手のないコップなどは最低でも2本の指とある程度の握力が必要になります。これら問題を解決するために数学の一分野である「トポロジー(位相幾何学)」を用いてカップをリデザインします。
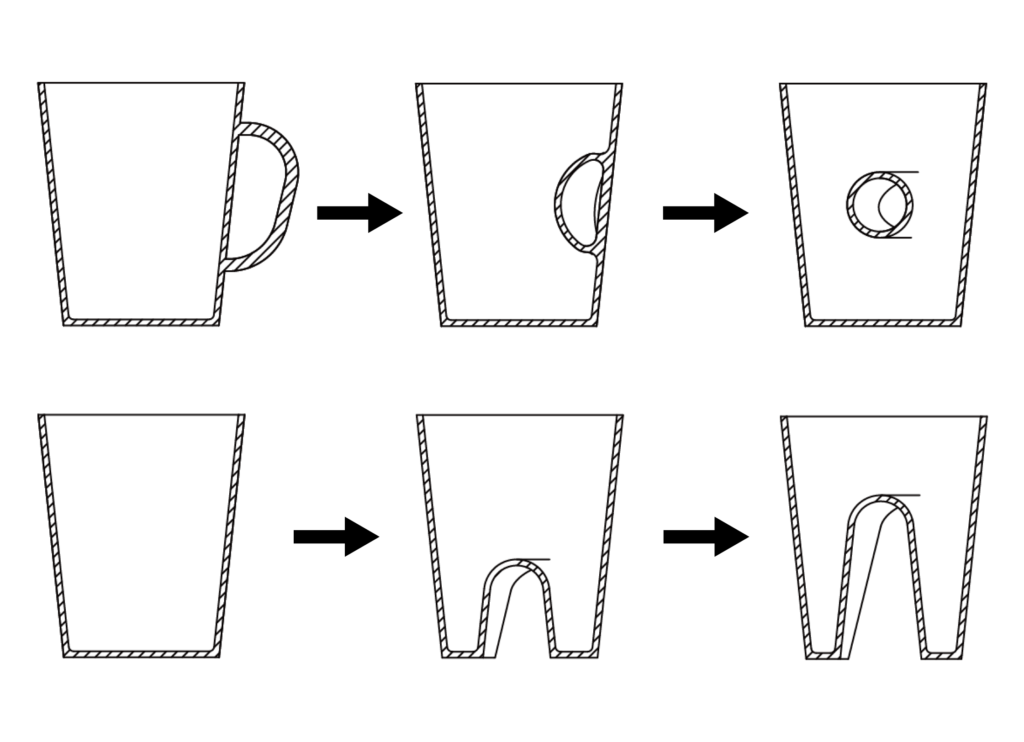
まずマグカップの取手部分をどんどん中心方向へと動かしていきます。容器と飲料物を合わせた全体の重心を通るように取手を配置すれば、指1本あれば持つことが可能な形になります。取手のないコップは底から指をかけるくぼみを作っていき、重心を通るように配置すれば同様に指1本で持つことが可能になります。ここで現実的な問題が発生します。マグカップを変形していくと容器内側を取手となる筒が通る構造となり、工業製品として量産することが難しくなります。以下では取手のないコップを変形した形をもとに考えていきます。

安定性
おおまかな形は決まりましたが、くぼみの正確な位置は決まっていません。また飲料物の容量が変われば重心も変わります。重心を通るようにくぼみを配置するといっても問題はまだ残っています。これはカップと飲料物と手指の3つが絡んだ安定性の問題です。
安定性を解析する学問として制御工学があります。制御工学を用いてこの問題について考えていきます。まず、くぼみの頂点(指が接地する支点)をどこにするのか?それはカップに飲料物(水)を満杯に注いだときの重心(以下、初期重心)とします。しかし実際に飲料物を満杯に注ぐことは稀です。また飲料部の水位は使用するごとに減っていきます。それに従い重心も下がっていきます。よって実使用上の重心は初期重心よりも必ず下に位置します。
このことから、カップのくぼみの頂点は飲料物満杯時の初期重心とし、それ以降の水位変化に伴った重心での安定性を解析し、安定であればこのカップは支点だけで支えることができます。このカップと飲料物と手指は振り子モデルと物理的に同じです。手指が接する支点とカップと飲料物を合わせた重心があり、振子の弦の長さがその都度変化するというものです。そしてこの振り子モデルは制御工学的に安定なシステムであることが保証されています。したがってこの形状は指1本でも持つことができるカップとなります。


